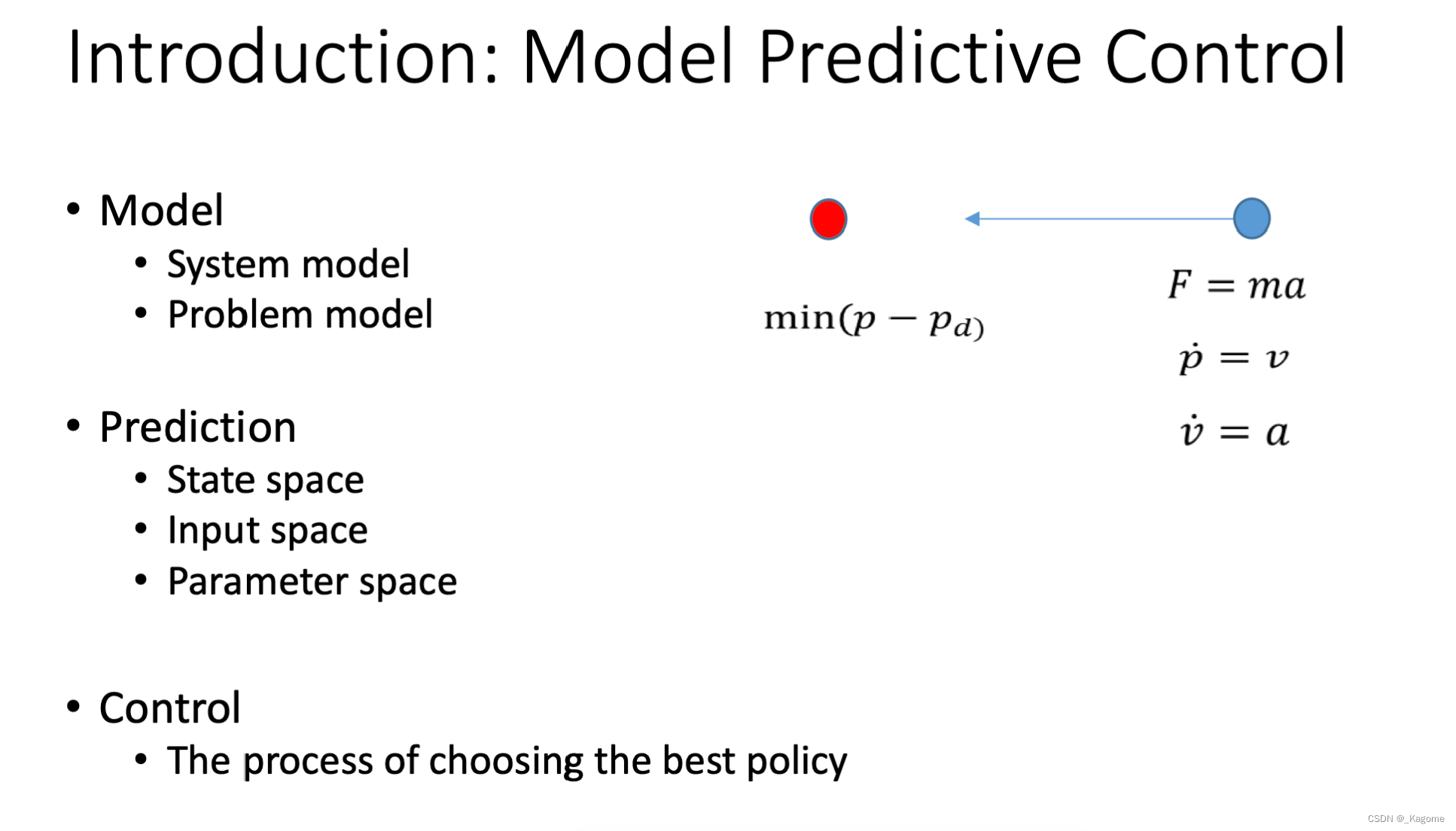
具体的MPC概念可以参考我之前的一篇Blog。
以上适用于大部分的模型。
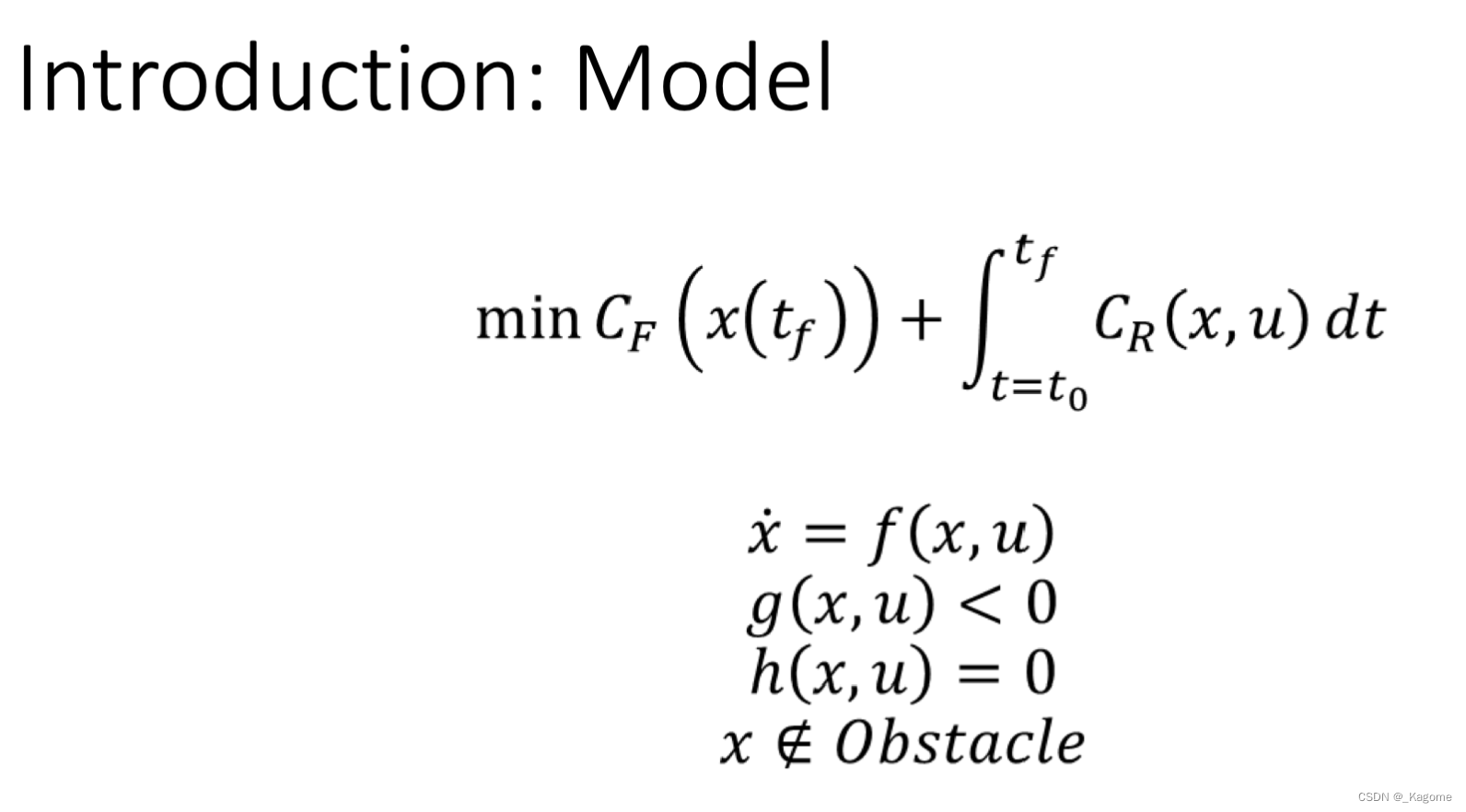
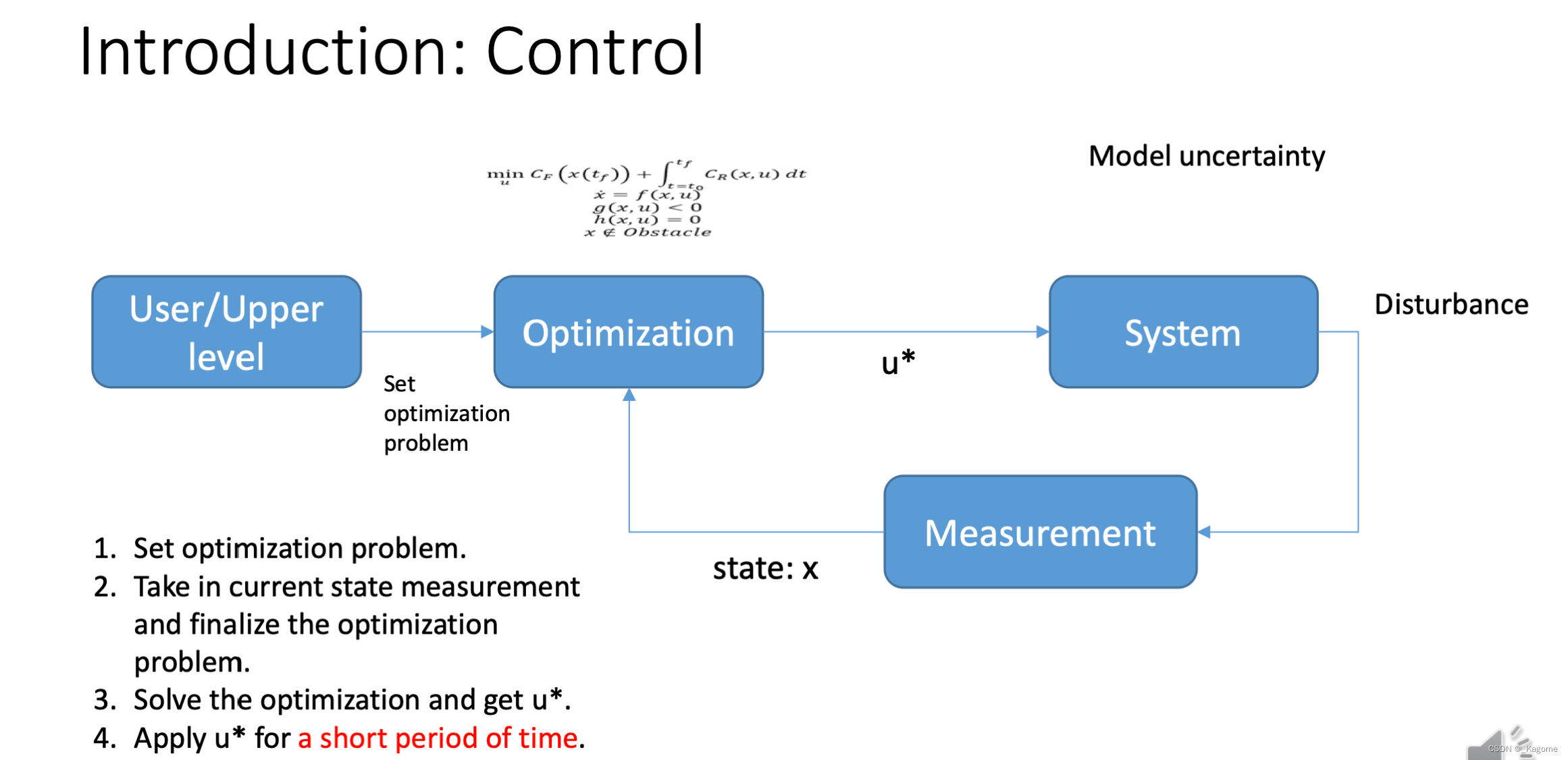
C F C_F CF?是终端Cost, C R C_R CR?是Running Cost,下面就是4个约束条件。
每一步都要解决最优化问题,看N步实施一步。
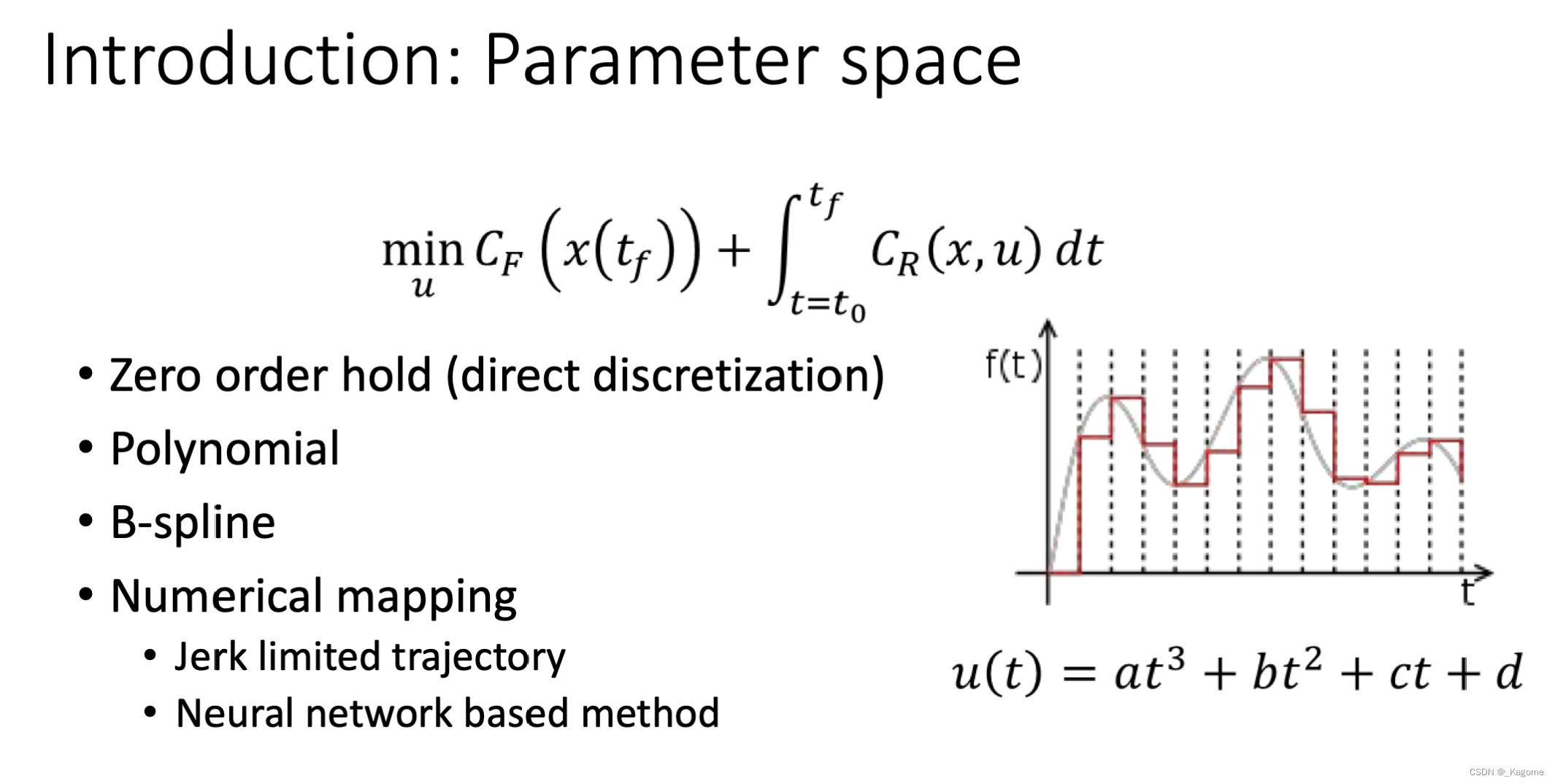
以上参数优化的问题当中,不管什么方法,都是减少参数空间的维度,使得问题更好解决。
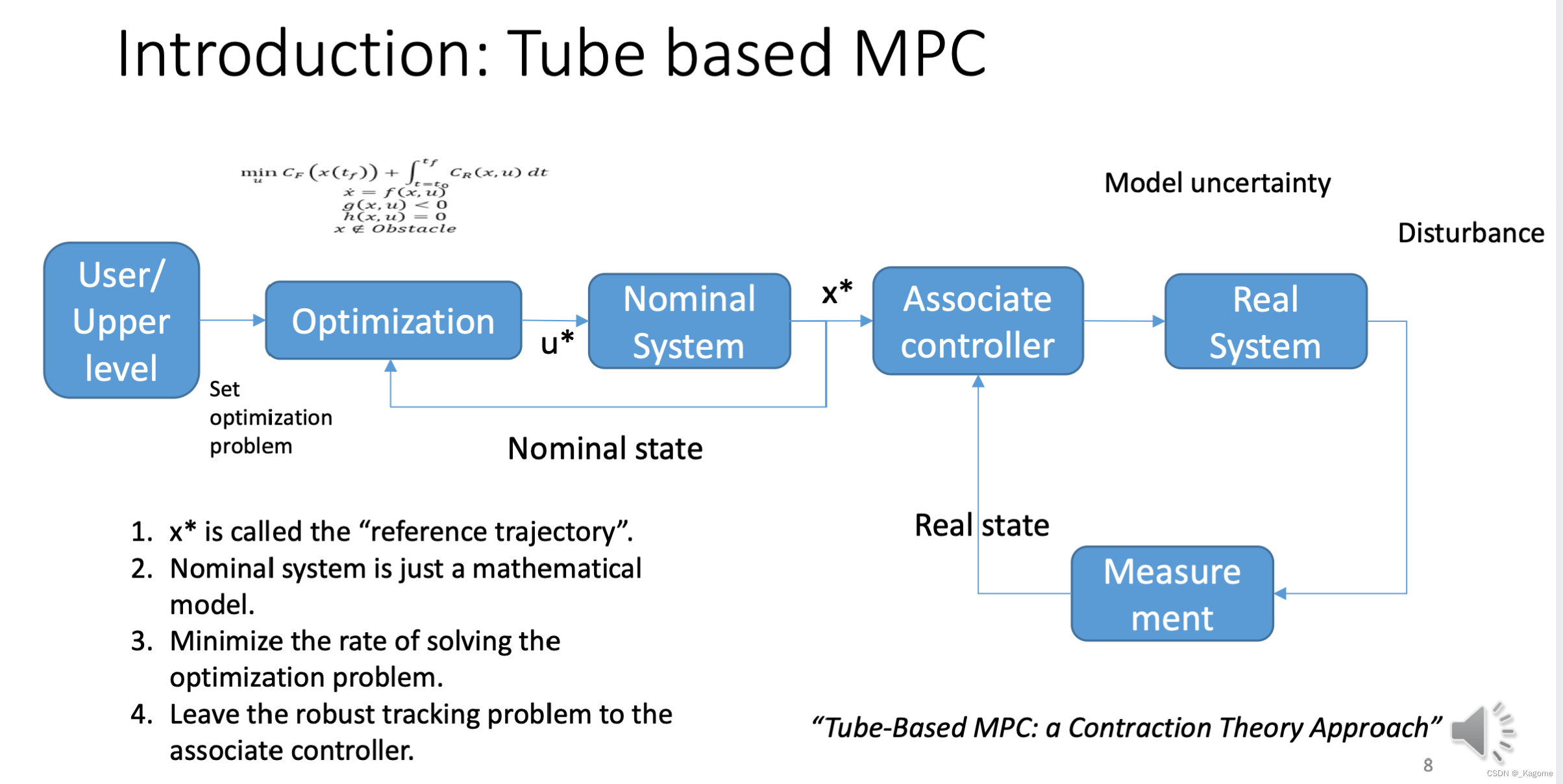
传统的MPC要求控制频率较高才能控制的住,比如说是四旋翼的内环,200~1000频率才能控制的住。但是这对四旋翼的计算资源完全是不现实的,所以发明了这个Tube based MPC框架。
Nominal System
就是 x ˙ = f ( x , u ) \dot{x}=f(x,u) x˙=f(x,u)。
新框架下,只对这个Nominal System进行控制,因为其只是一个数学模型,不受外界扰动控制,只需要用一个非常低的频率进行控制。
Associate Controller
我们期望就是Real State与Nominal State保持一致。
于是系统第二部分就引入了一个Associate Controller(线性控制器,其可以处理模型的不确定性)去跟踪Real State。
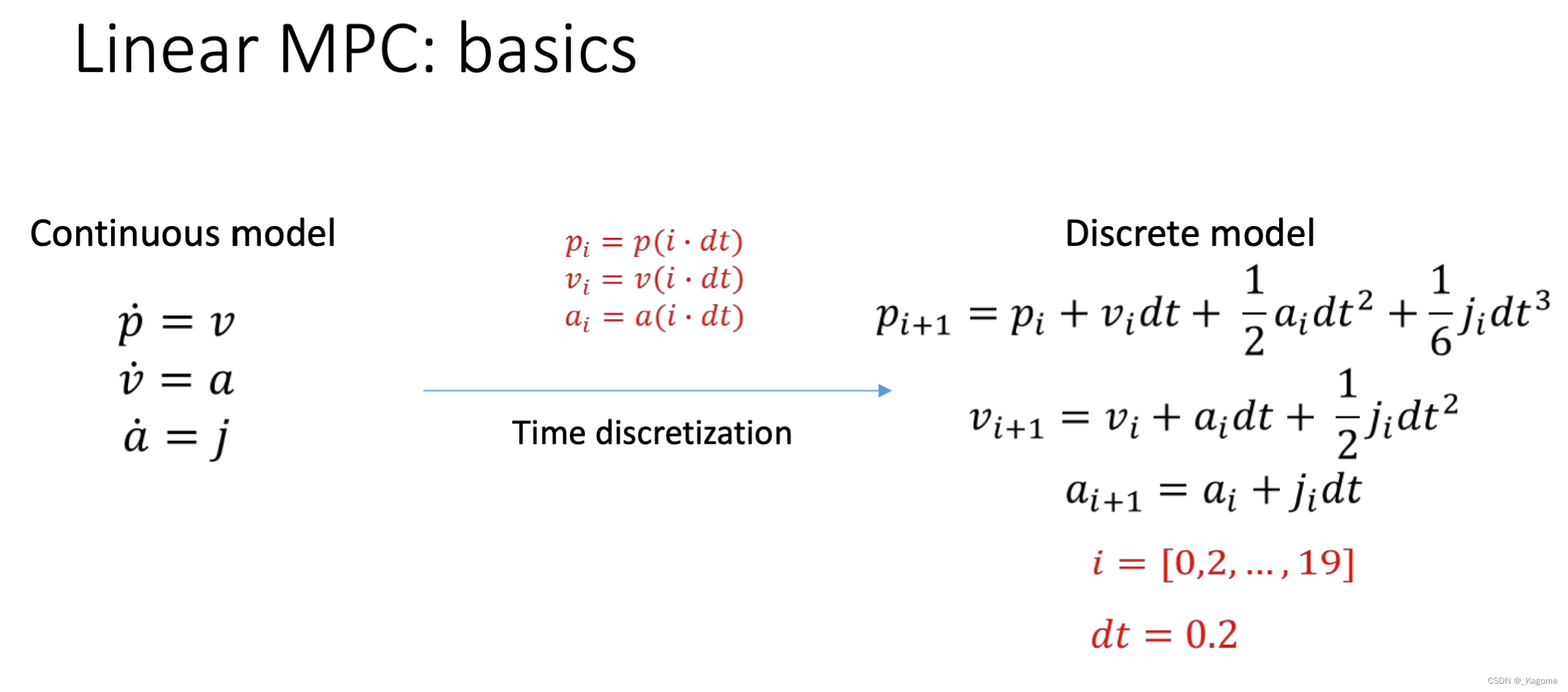
先考虑优化未来4s的时间状态。
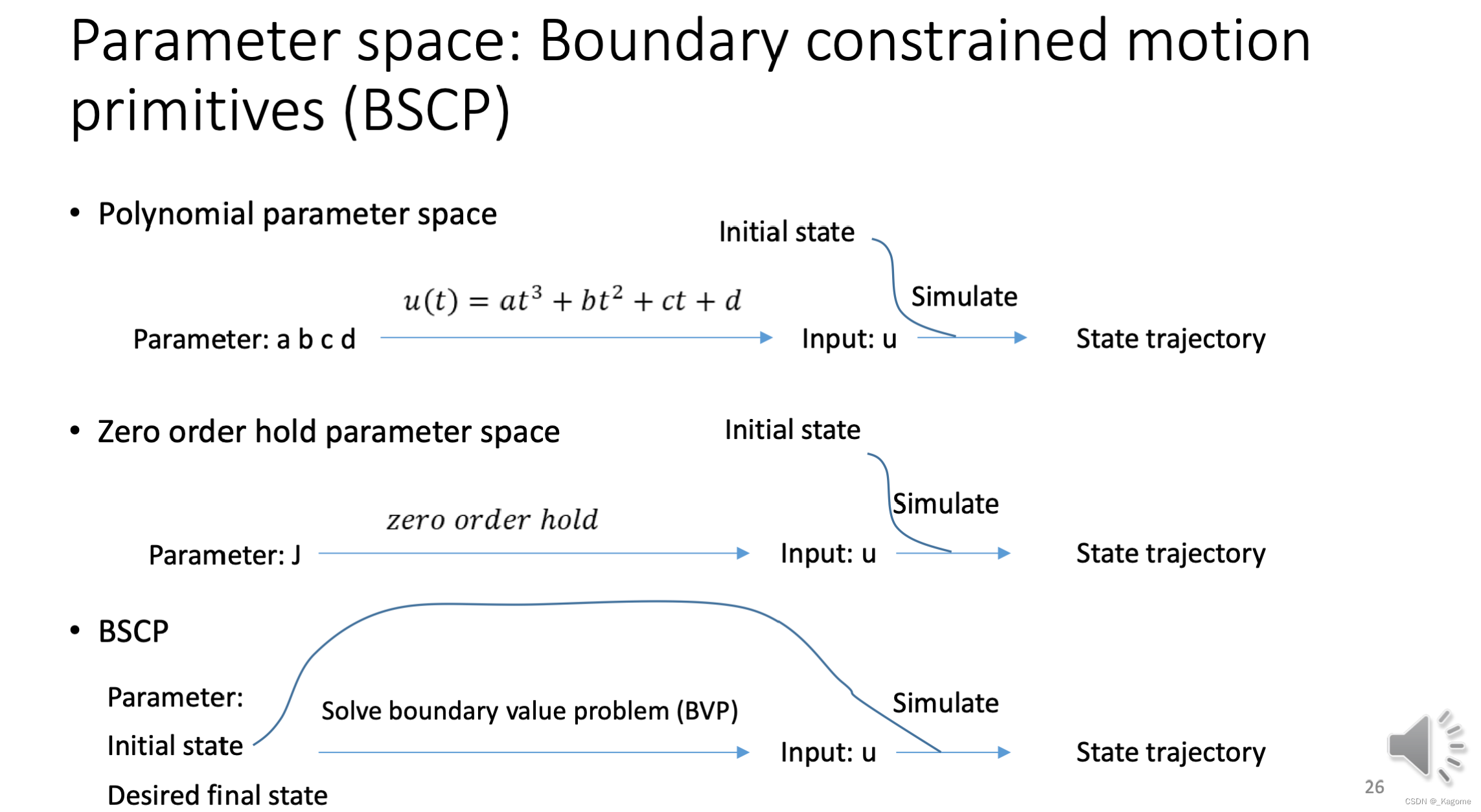
进行离散化,把向量
P
,
V
,
A
P,V,A
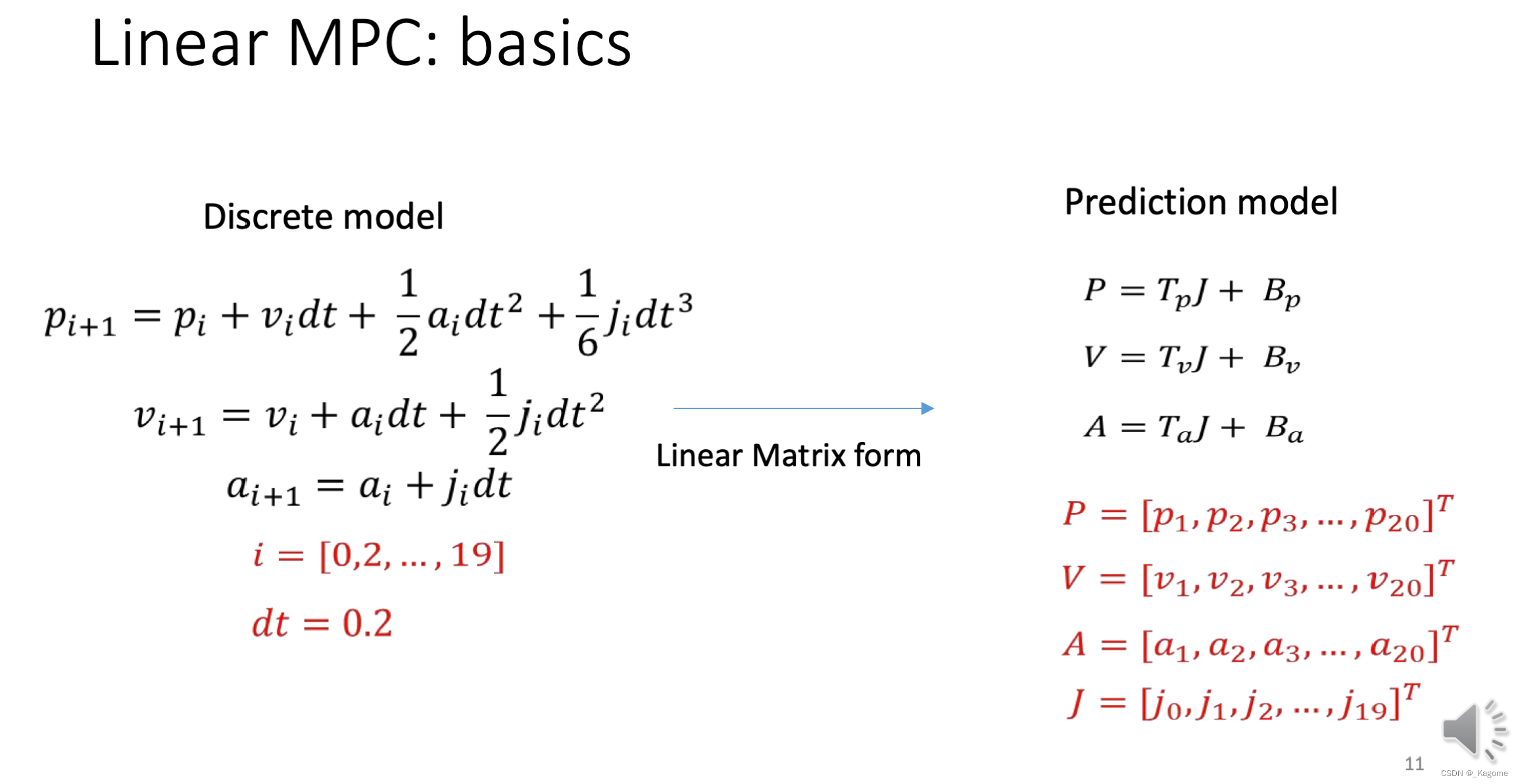
P,V,A称作是预测模型,
J
J
J称作参数空间。
每当选定参数空间的一组数值,就能得到预测模型,得到 P , V , A P,V,A P,V,A的一组值。
两个目标:
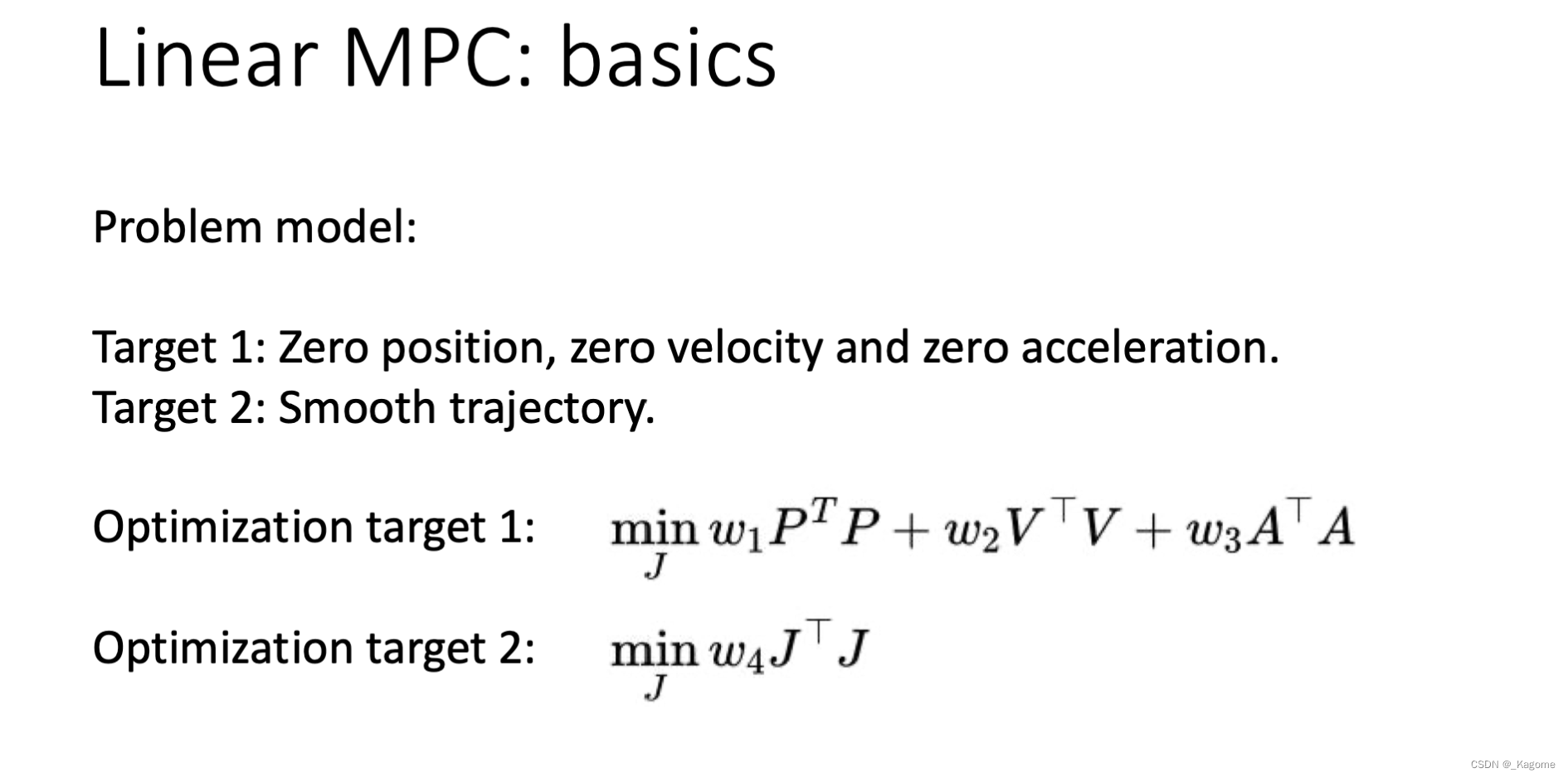
以下是个凸优化的问题,二次优化。
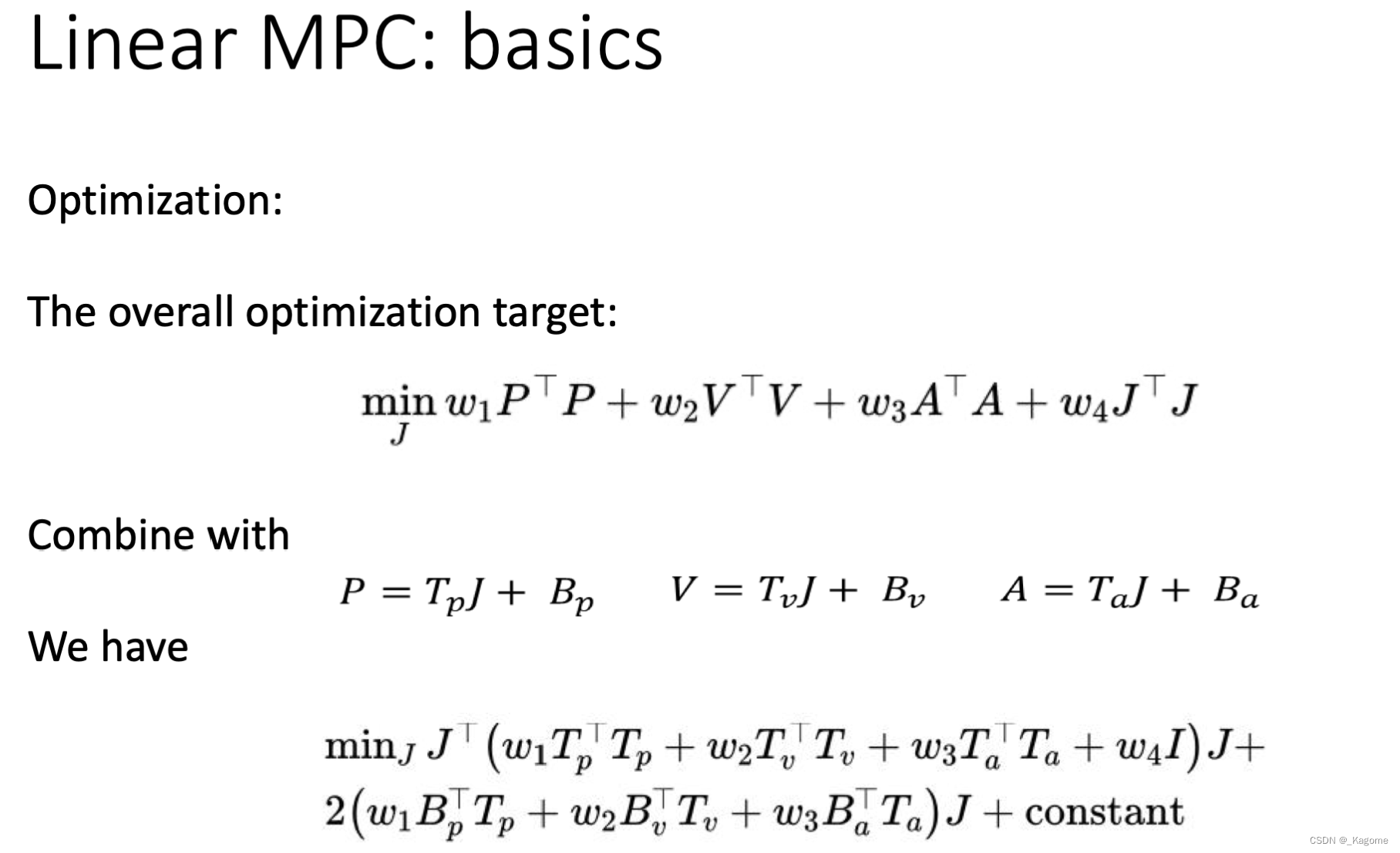
反正根据以上所说的4个步骤进行MPC。
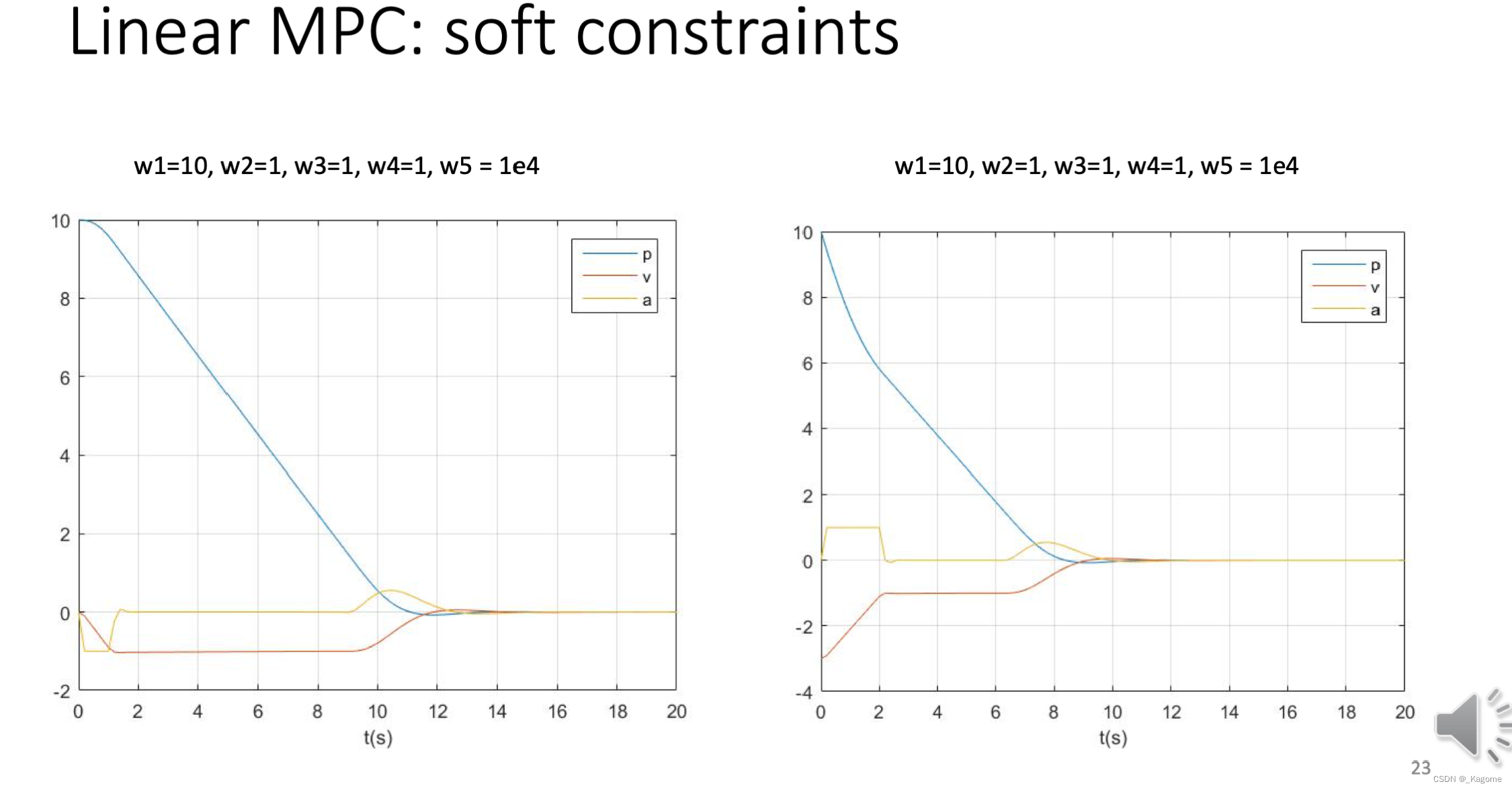
分别调节
w
1
,
w
2
,
w
3
,
w
4
w_1,w_2,w_3,w_4
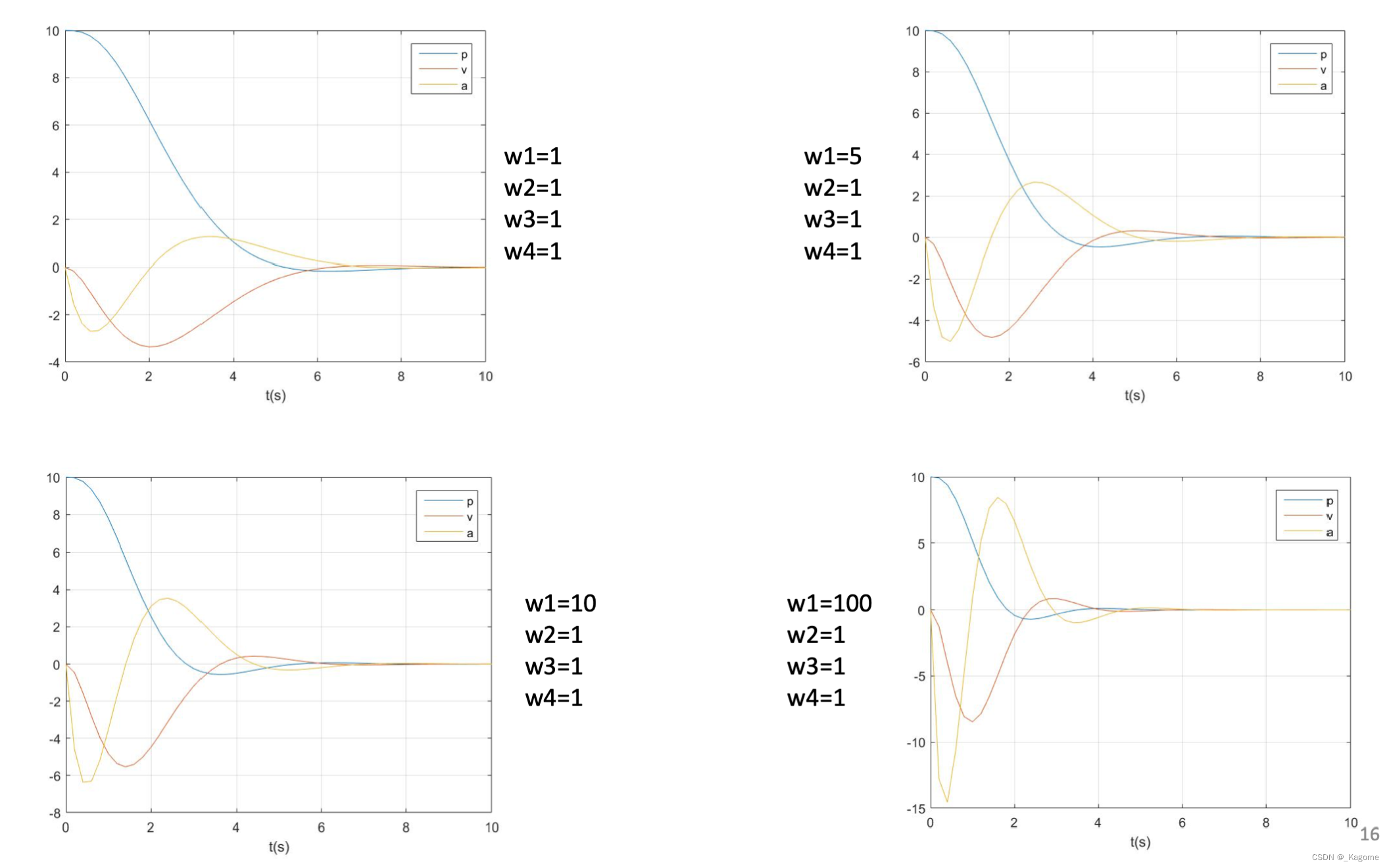
w1?,w2?,w3?,w4?这4个权重的值,就能侧重于
P
,
V
,
A
,
J
P,V,A,J
P,V,A,J的某个量,比如把
w
1
w_1
w1?调大,就侧重于
P
P
P。

线性MPC与二次规划解出的是一样的。
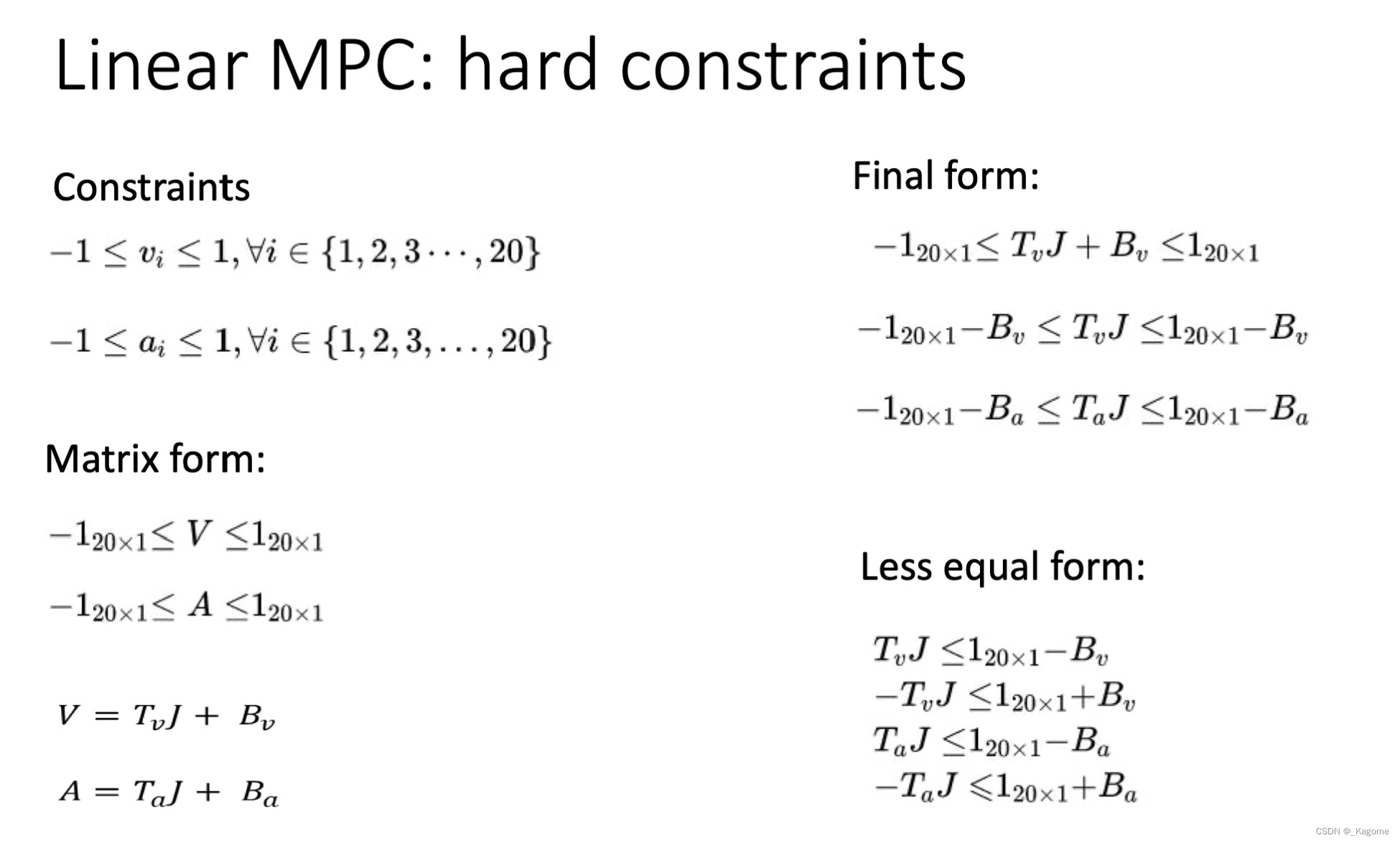
硬约束与软约束条件:

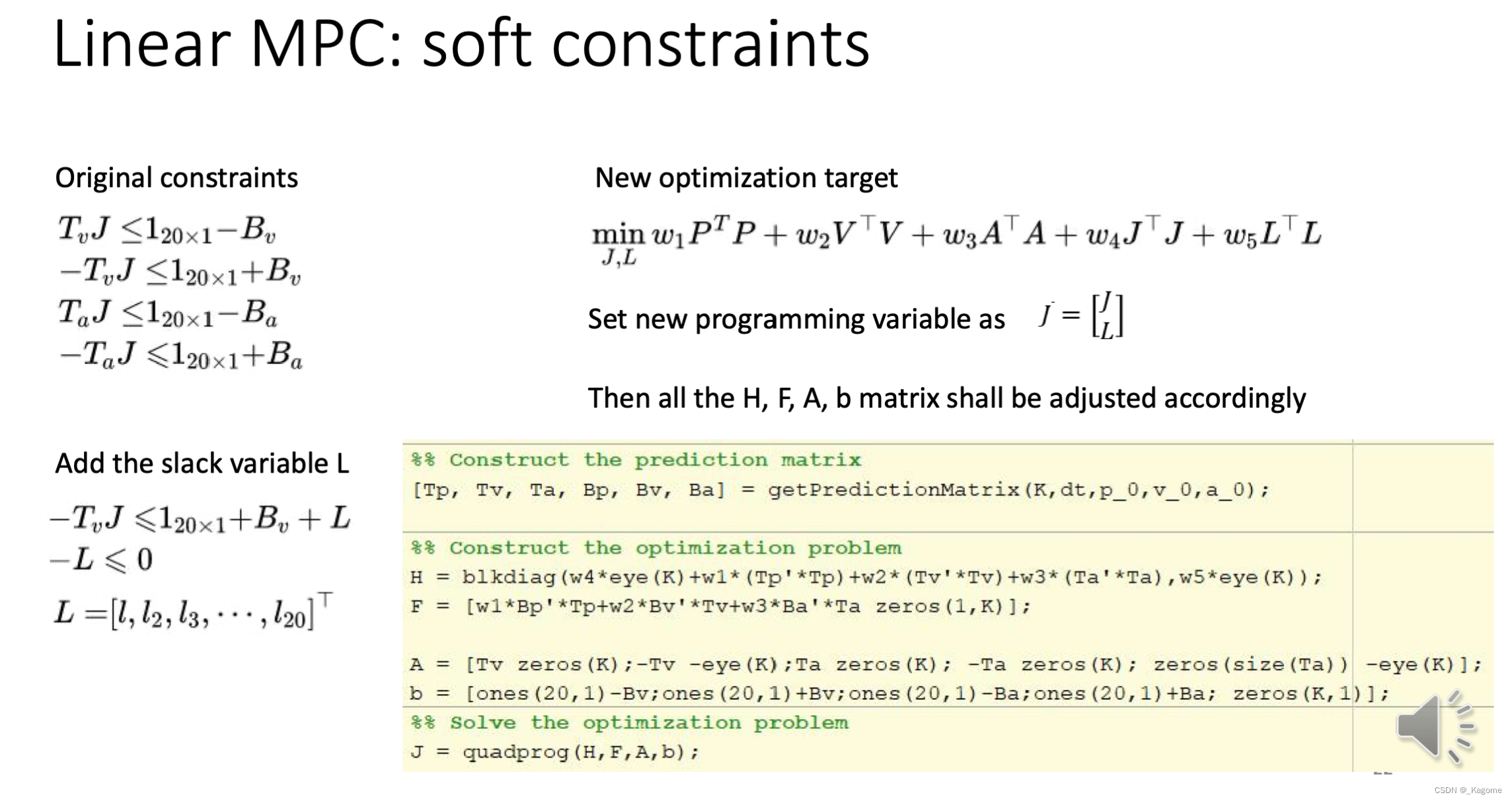
哪些约束考虑成软约束?
一般来讲,所有涉及状态的约束,都设计成软约束,这是因为状态往往会涉及到测量噪声以及外界干扰的影响,使得初始值一来就已经违反了我们的约束条件,所以我们需要软约束,避免最优化问题没有解。
哪些约束考虑成软约束?
输入是不会测量噪声以及外界干扰的影响的,是我们可以随意变动的,所以考虑成硬约束。
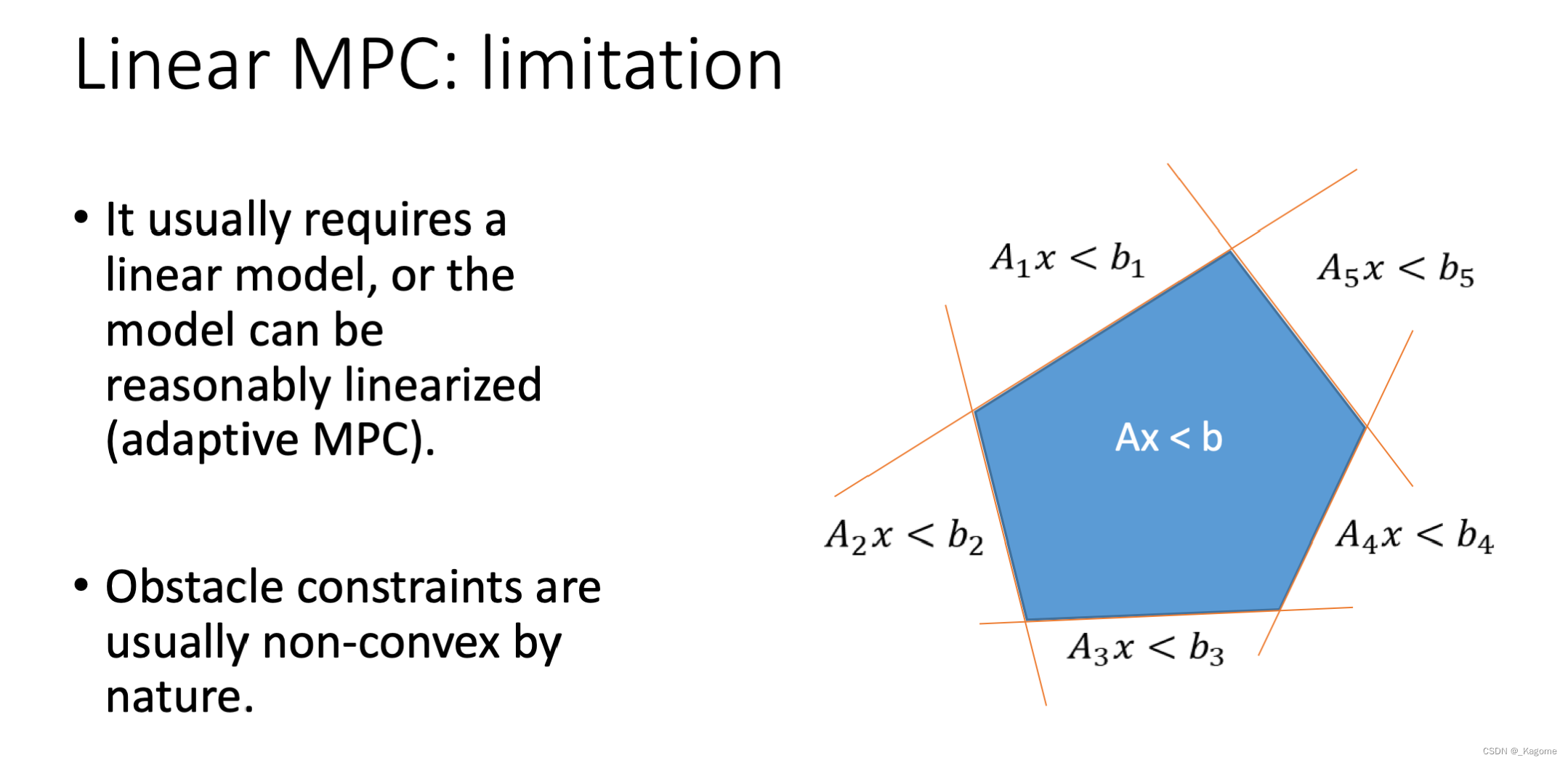
线性MPC的缺陷